源:
1.单位冲击响应与频响
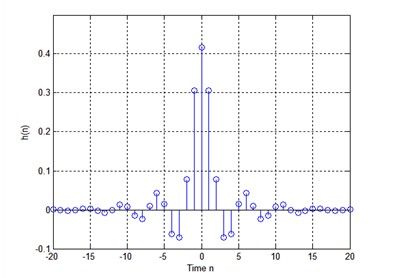
就如同之前所说的一样,使用下图所示的单位冲击响应,所设计的滤波器,是无法实现的。
现在,让我们看看其这个滤波器的频响。所谓频响,就是计算其单位冲击响应的离散时间傅里叶变换,
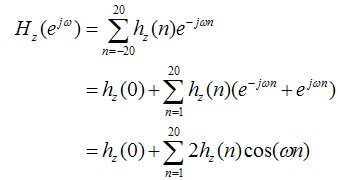
我们可以看出,这个滤波器的频响的计算结果是实数,并没有虚数部分。也就是,其相位谱一直是0,也就意味着,这个滤波器输入与输出之间没有延迟,这种相位特性称为0延迟相位特性。
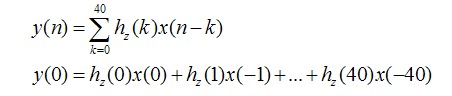
但是,这个滤波器无法是无法实现的。我们实际计算一下该滤波器的输入输出,就可以明白。

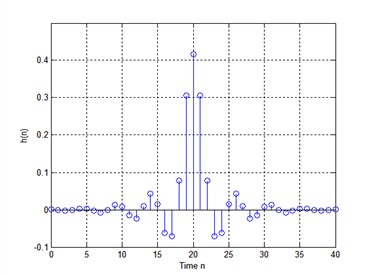
这个滤波器在计算的过程中,需要过去的值和未来的值。未来的值是不可预测的,所以,这个滤波器无法实现。为了使得这个滤波器可以实现,我们只好移动其单位冲击响应,使得其不再需要未来的值。比如,就像下面这样移动。
这样的话,这个滤波器就可以实现了,我们只需要记录其40个过去的输入值和现在的输入值。但是,由于移动了其单位冲击响应,会不会对频响产生什么影响呢,我们来看看。
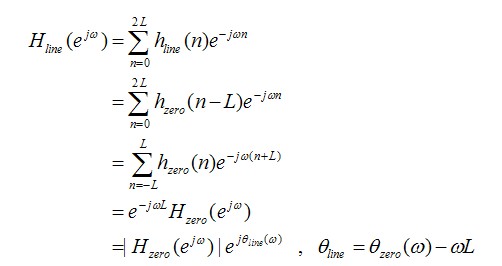
为了更好的说明问题,L去代替之前例子中的20。
移动之后频响,我们根据上面式子可以得出两个结论:1,移动不会对幅度谱产生影响。2,,移动会对相位产生一个延迟,这个延迟主要取决于移动的长度,移动的长度越长,延迟越大。但是,这个移动是线性的。
因此,我们把这个移动的相位特性称为,线性相位特性。到这里,我们移动后的,因果的,可实现的滤波器的单位冲击响应,如下所示。
2.窗函数实现的FIR滤波器代码(C语言)
#include#include #include #include #define pi (3.1415926)/*-------------Win Type----------------*/#define Hamming (1)double Input_Data[] = {0.000000 , 0.896802 , 1.538842 , 1.760074 , 1.538842 , 1.000000 , 0.363271 , -0.142040 , -0.363271 , -0.278768,0.000000 , 0.278768 , 0.363271 , 0.142020 , -0.363271 , -1.000000 , -1.538842 , -1.760074 , -1.538842 , -0.896802,0.000000 , 0.896802 , 1.538842 , 1.760074 , 1.538842 , 1.000000 , 0.363271 , -0.142040 , -0.363271 , -0.278768,0.000000 , 0.278768 , 0.363271 , 0.142020 , -0.363271 , -1.000000 , -1.538842 , -1.760074 , -1.538842 , -0.896802,0.000000 , 0.896802 , 1.538842 , 1.760074 , 1.538842 , 1.000000 , 0.363271 , -0.142040 , -0.363271 , -0.278768,0.000000 , 0.278768 , 0.363271 , 0.142020 , -0.363271 , -1.000000 , -1.538842 , -1.760074 , -1.538842 , -0.896802,0.000000 , 0.896802 , 1.538842 , 1.760074 , 1.538842 , 1.000000 , 0.363271 , -0.142040 , -0.363271 , -0.278768,0.000000 , 0.278768 , 0.363271 , 0.142020 , -0.363271 , -1.000000 , -1.538842 , -1.760074 , -1.538842 , -0.896802,0.000000 , 55};double sinc(double n){ if(0==n) return (double)1; else return (double)(sin(pi*n)/(pi*n));} int Unit_Impulse_Response(int N,double w_c, int Win_Type, double *Output_Data){ signed int Count = 0; for(Count = -(N-1)/2;Count <= (N-1)/2;Count++) { *(Output_Data+Count+((N-1)/2)) = (w_c/pi)*sinc((w_c/pi)*(double)(Count)); //printf("%d %lf ",Count+((N-1)/2)+1,*(Output_Data+Count+((N-1)/2))); //if(Count%4 == 0) printf("\n"); } switch (Win_Type) { case Hamming: printf("Hamming \n"); for(Count = -(N-1)/2;Count <= (N-1)/2;Count++) { *(Output_Data+Count+((N-1)/2)) *= (0.54 + 0.46 * cos((2*pi*Count)/(N-1))); //printf("%d %lf ",Count+((N-1)/2)+1,*(Output_Data+Count+((N-1)/2))); //if(((Count+1)%5 == 0)&&(Count != -20)) printf("\n"); } break; default: printf("default Hamming \n"); for(Count = -(N-1)/2;Count <= (N-1)/2;Count++) { *(Output_Data+Count+((N-1)/2)) *= (0.54 + 0.46 * cos((2*pi*Count)/(N-1))); //printf("%d %lf ",Count+((N-1)/2)+1,*(Output_Data+Count+((N-1)/2))); //if(((Count+1)%5 == 0)&&(Count != -20)) printf("\n"); } break; } return (int)1;}void Save_Input_Date (double Scand, int Depth, double *Input_Data){ int Count; for(Count = 0 ; Count < Depth-1 ; Count++) { *(Input_Data + Count) = *(Input_Data + Count + 1); } *(Input_Data + Depth-1) = Scand;}double Real_Time_FIR_Filter(double *b, int b_Lenth, double *Input_Data){ int Count; double Output_Data = 0; Input_Data += b_Lenth - 1; for(Count = 0; Count < b_Lenth ;Count++) { Output_Data += (*(b + Count)) * (*(Input_Data - Count)); } return (double)Output_Data;}int main(void){ double w_p = pi/10; double w_s = pi/5; double w_c = (w_s + w_p)/2; printf("w_c = %f \n" , w_c); int N = 0; N = (int) ((6.6*pi)/(w_s - w_p) + 0.5); if(0 == N%2) N++; printf("N = %d \n" , N); double *Impulse_Response; Impulse_Response = (double *) malloc(sizeof(double)*N); memset(Impulse_Response, 0, sizeof(double)*N); Unit_Impulse_Response(N,w_c, Hamming, Impulse_Response); double *Input_Buffer; double Output_Data = 0; Input_Buffer = (double *) malloc(sizeof(double)*N); memset(Input_Buffer, 0, sizeof(double)*N); int Count = 0; FILE *fs; fs=fopen("FIR_Data.txt","w"); while(1) { if(Input_Data[Count] == 55) break; Save_Input_Date (Input_Data[Count], N, Input_Buffer); Output_Data = Real_Time_FIR_Filter(Impulse_Response, N, Input_Buffer); fprintf(fs,"%lf,",Output_Data); //if(((Count+1)%5 == 0)&&(Count != 0)) fprintf(fs,"\r\n"); Count++; } /*---------------------display-------------------------------- for(Count = 0; Count < N;Count++) { printf("%d %lf ",Count,*(Input_Buffer+Count)); if(((Count+1)%5 == 0)&&(Count != 0)) printf("\n"); } */ fclose(fs); printf("Finish \n"); return (int)0;}
3.频响的问题
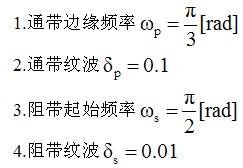
按照上面程序,参数如下设定。
运行程序,我们就实现了一个FIR滤波器。我们使用Matlab做出其频响。
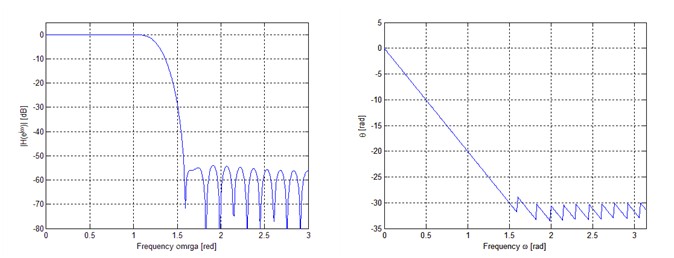
好了,这里可以看出,从其幅度特性看来,我们确实实现了一个低通滤波器。但是,相位特性就比较奇怪(为了方便看出问题,我已经进行了解卷绕,至于什么是解卷绕,为什么要解卷绕,之后会说)。
那么,问题来了!按照道理来说,这个FIR滤波器应该是拥有线性相位特性的,但是为什么这里的线性相位特性确不是一条直线!在接近于阻带起始频率的地方,有什么会震荡?这个问题,之后再解决吧。
<-----------戳我
4.实际的滤波效果
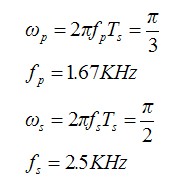
为了验证效果,我们输入实际的信号看看。这里,我们选择采样周期为10ms(0.1ms,2014.10.3日修正),那么,其通带频率和阻带起始频率为
为了验证其性质,我选择了1KHz和3KHz的频率混合,最终输出。输入的波形如下。
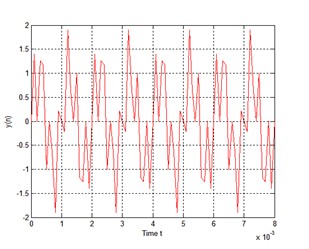
其输出波形是如下。
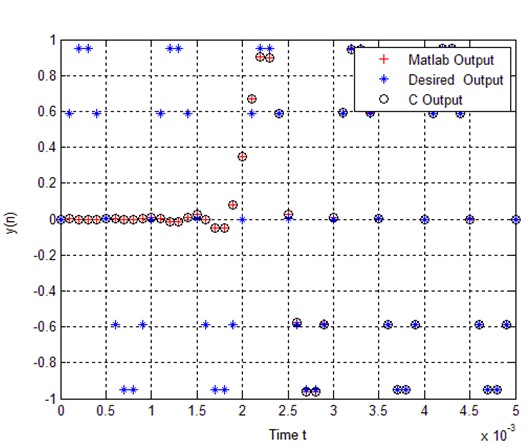
红色的“+”是Matlab计算的结果,黑的o是我用C语言实现的滤波器的计算结果,蓝的*号是1KHz的信号,也就是希望的输出。可以看出,这个滤波器有一定的延迟,但是滤波效果还是不错。
博客地址: